|
针对上述问题,在国家自然科学基金、NSFC-浙江两化融合联合基金等的资助下,中国科学院宁波材料所技术与工程研究所陈涛研究员团队开发了一种可编程性强、驱动速度快的光控无约束软体驱动器,其不仅可在红外光的控制下进行可控的自身形变,还可通过限域回火处理实现仿生“翻滚”式快速运动和用作运输物品的软体机器人(Nat. Commun., 2020, 11, 4359, doi.org/10.1038/s41467-020-18214-0)。研究人员将前期研究在水/空气界面组装的大面积石墨烯薄膜(SGA)(ZL201510466050.3;Chem. Mater., 2016, 28, 7125;ACS Nano, 2019, 13, 4368;Nano Energy, 2019, 59, 422)转移到热膨胀系数远高于石墨烯的商用聚乙烯材质的保鲜膜(PE)上得到SGA/PE双层复合膜(图1a-c)。所得SGA/PE在外界热刺激下表现出通常双层膜驱动器常见的驱动行为(图1d),值得注意的是,若进行如钢铁冶金行业的回火处理,该复合膜通过限域回火处理后,可得到初始构型可调的SGA/PE驱动器,初始构型变形曲率可通过SGA膜层数和回火处理温度进行精确调控(图1e-g)。
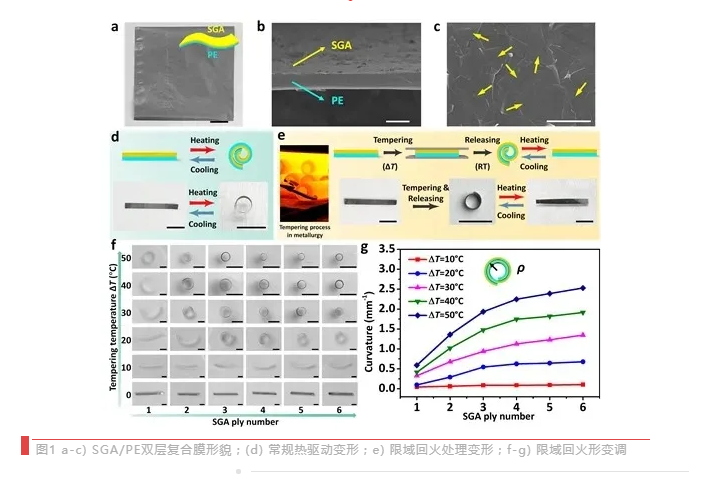
图1 a-c) SGA/PE双层复合膜形貌;(d) 常规热驱动变形;e) 限域回火处理变形;f-g) 限域回火形变调
尤其重要的是,通过与香港理工大学姚海民教授团队在分子动力学模拟和有限元分析上的合作,表明SGA层具有非对称弹塑性力学性能,SGA受拉伸时由于内部各石墨烯片层之间不可逆的相对滑动而表现为高塑性,SGA受压缩时由于可逆的屈曲褶皱变形表现为高弹性。在受限空间下的回火处理过程中正是SGA层非对称弹塑性力学性能使得SGA/PE具有室温构型可编程性能,通过理论计算得到的回火处理的SGA/PE变形曲率和实际变形曲率具有良好的一致性(图2)。
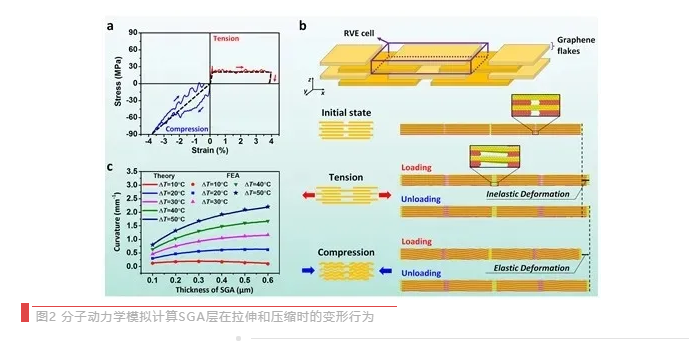
图2 分子动力学模拟计算SGA层在拉伸和压缩时的变形行为
进一步通过图案化的石墨烯薄膜和/或局部回火预处理策略,实现了对这种热诱导变形系统的初始构型的定制化编程设计,从而创建了具有三维复杂驱动的形变系统。基于这种优异的形状变形控制性能,研究者将SGA/PE应用于开发各种热或光响应驱动器件,包括人工虹膜、人工睡莲,仰卧起坐机器人等固定位置的自身变形体系(图3)。
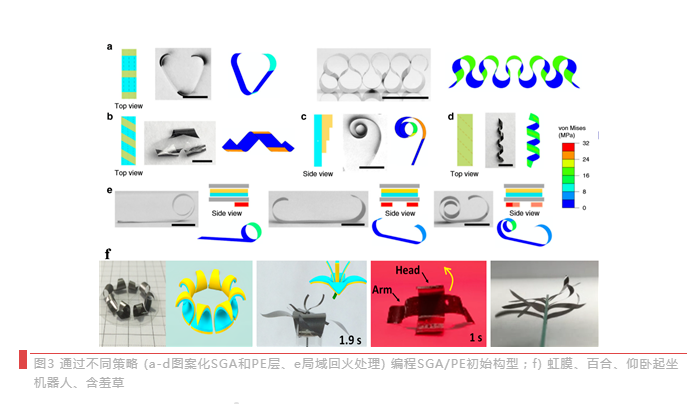
图3 通过不同策略 (a-d图案化SGA和PE层、e局域回火处理) 编程SGA/PE初始构型;f) 虹膜、百合、仰卧起坐机器人、含羞草
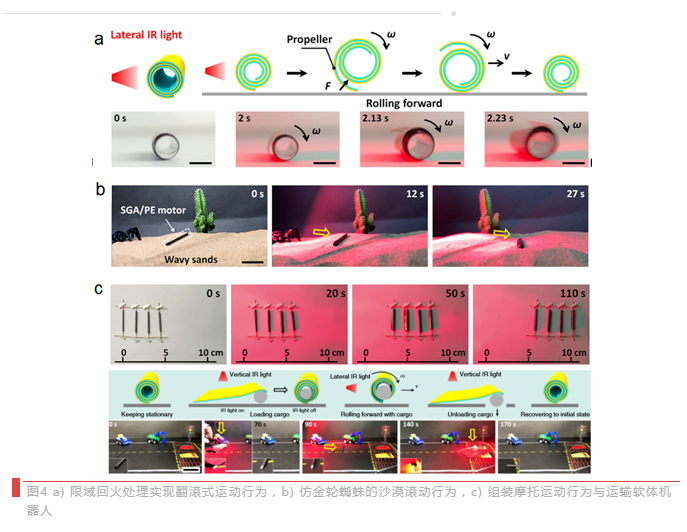
特别需要提及的是,限域回火处理后的SGA/PE双层膜在室温下自发卷曲成多层卷构型,可用于构筑不受束缚的光控运动器件,其在外界侧向红外光照刺激下可实现在平地与模拟沙漠上的连续翻滚前进运动(图4a-b),还可组装成四轴运动的摩托机器以及基于此的可运输物品的软体机器人(图4c)。
(来源:中国科学院宁波材料技术与工程研究所)
|